(Brette & Guigon, 2003): Reliability of spike timing
Implementation of the paper:
Brette R and E Guigon (2003). Reliability of Spike Timing Is a General Property of Spiking Model Neurons. Neural Computation 15, 279-308.
[1]:
import brainpy as bp
import brainpy.math as bm
import matplotlib.pyplot as plt
[2]:
class ExternalInput(bp.dyn.DynamicalSystem):
def __init__(self, num):
super(ExternalInput, self).__init__()
# parameters
self.num = num
# variables
self.I = bm.Variable(bm.zeros(num))
[3]:
class LinearLeakyModel(bp.dyn.NeuGroup):
r"""A nonlinear leaky model.
.. math::
\tau \frac{d V}{d t}=-V+R I(t)
"""
def __init__(self, size, inputs):
super(LinearLeakyModel, self).__init__(size)
# parameters
self.tau = 33 # ms
self.R = 200 / 1e3 # Ω
self.Vt = 15 # mV
self.Vr = -5 # mV
self.sigma = 1.
self.inputs = inputs
# variables
self.V = bm.Variable(bm.random.uniform(self.Vr, self.Vt, self.num))
self.spike = bm.Variable(bm.zeros(self.num, dtype=bool))
# functions
f = lambda V, t: (-V + self.R * self.inputs.I) / self.tau
g = lambda V, t: self.sigma * bm.sqrt(2. / self.tau)
self.integral = bp.sdeint(f=f, g=g)
def update(self, _t, _dt):
self.inputs.update(_t, _dt)
self.V.value = self.integral(self.V, _t, _dt)
self.spike.value = self.V >= self.Vt
self.V.value = bm.where(self.spike, self.Vr, self.V)
[4]:
class NonlinearLeakyModel(bp.dyn.NeuGroup):
r"""A nonlinear leaky model.
.. math::
\tau \frac{d V}{d t}=-a V^{3}+R I(t)
"""
def __init__(self, size, inputs):
super(NonlinearLeakyModel, self).__init__(size)
# parameters
self.tau = 33 # ms
self.R = 200 / 1e3 # MΩ
self.Vt = 15 # mV
self.Vr = -5 # mV
self.a = 4444 / 1e6 # V^(-2)
self.sigma = 1.
self.inputs = inputs
# variables
self.V = bm.Variable(bm.zeros(self.num))
self.spike = bm.Variable(bm.zeros(self.num, dtype=bool))
# functions
f = lambda V, t: (-self.a * V ** 3 + self.R * self.inputs.I) / self.tau
g = lambda V, t: self.sigma * bm.sqrt(2. / self.tau)
self.integral = bp.sdeint(f=f, g=g)
def update(self, _t, _dt):
self.inputs.update(_t, _dt)
self.V.value = self.integral(self.V, _t, _dt)
self.spike.value = self.V >= self.Vt
self.V.value = bm.where(self.spike, self.Vr, self.V)
[5]:
class NonLeakyModel(bp.dyn.NeuGroup):
r"""A non-leaky model.
.. math::
\tau \frac{d V}{d t}=V I(t)+k
"""
def __init__(self, size, inputs):
super(NonLeakyModel, self).__init__(size)
# parameters
self.Vt = 1
self.Vr = 0
self.tau = 33 # ms
self.k = 1
self.sigma = 0.02
self.inputs = inputs
# variables
self.V = bm.Variable(bm.random.uniform(self.Vr, self.Vt, self.num))
self.spike = bm.Variable(bm.zeros(self.num, dtype=bool))
# functions
f = lambda V, t: (V * self.inputs.I + self.k) / self.tau
g = lambda V, t: self.sigma * (2 / self.tau) ** .5
self.integral = bp.sdeint(f, g, method='euler')
def update(self, _t, _dt):
self.inputs.update(_t, _dt)
self.V.value = self.integral(self.V, _t, _dt)
self.spike.value = self.V >= self.Vt
self.V.value = bm.where(self.spike, self.Vr, self.V)
[6]:
class PerfectIntegrator(bp.dyn.NeuGroup):
r"""Integrate inputs.
.. math::
\tau \frac{d V}{d t}=f(t)
where :math:`f(t)` is an input function.
"""
def __init__(self, size, inputs):
super(PerfectIntegrator, self).__init__(size)
# parameters
self.tau = 12.5 # ms
self.Vt = 1
self.Vr = 0
self.sigma = 0.27
self.inputs = inputs
# variables
self.V = bm.Variable(bm.random.uniform(self.Vr, self.Vt, self.num))
self.spike = bm.Variable(bm.zeros(self.num, dtype=bool))
# functions
f = lambda V, t: self.inputs.I / self.tau
g = lambda V, t: self.sigma * (2 / self.tau) ** .5
self.integral = bp.sdeint(f, g, method='euler')
def update(self, _t, _dt):
self.inputs.update(_t, _dt)
self.V.value = self.integral(self.V, _t, _dt)
self.spike.value = self.V >= self.Vt
self.V.value = bm.where(self.spike, self.Vr, self.V)
[7]:
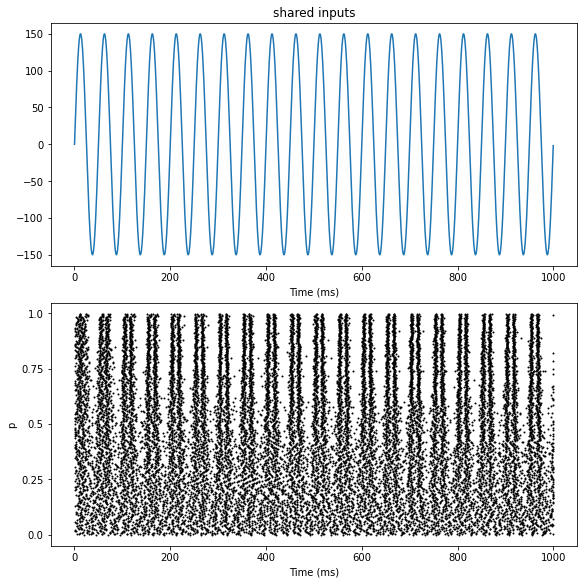
def figure6(sigma=0.):
class Noise(ExternalInput):
def __init__(self, num):
super(Noise, self).__init__(num)
# parameters
self.p = bm.linspace(0., 1., num)
# variables
self.B = bm.Variable(bm.zeros(1))
def update(self, _t, _dt):
self.B[:] = 30 * bm.sin(40 * bm.pi * _t / 1000) # (1,)
self.I.value = 85 + 40 * (1 - self.p) + self.p * self.B # (num,)
num = 500
model = LinearLeakyModel(num, inputs=Noise(num))
model.sigma = sigma
runner = bp.dyn.DSRunner(model, monitors=['inputs.B', 'spike'])
runner.run(2000.)
fig, gs = bp.visualize.get_figure(2, 1, 4, 12)
fig.add_subplot(gs[0, 0])
bp.visualize.line_plot(runner.mon.ts, runner.mon['inputs.B'], title='shared inputs')
fig.add_subplot(gs[1, 0])
bp.visualize.raster_plot(runner.mon.ts, runner.mon['spike'], ylabel='p')
plt.yticks(bm.linspace(0, num, 5).numpy(), bm.linspace(0., 1., 5).numpy())
plt.show()
[8]:
figure6(0.)
WARNING:absl:No GPU/TPU found, falling back to CPU. (Set TF_CPP_MIN_LOG_LEVEL=0 and rerun for more info.)
[9]:
figure6(1.)
[10]:
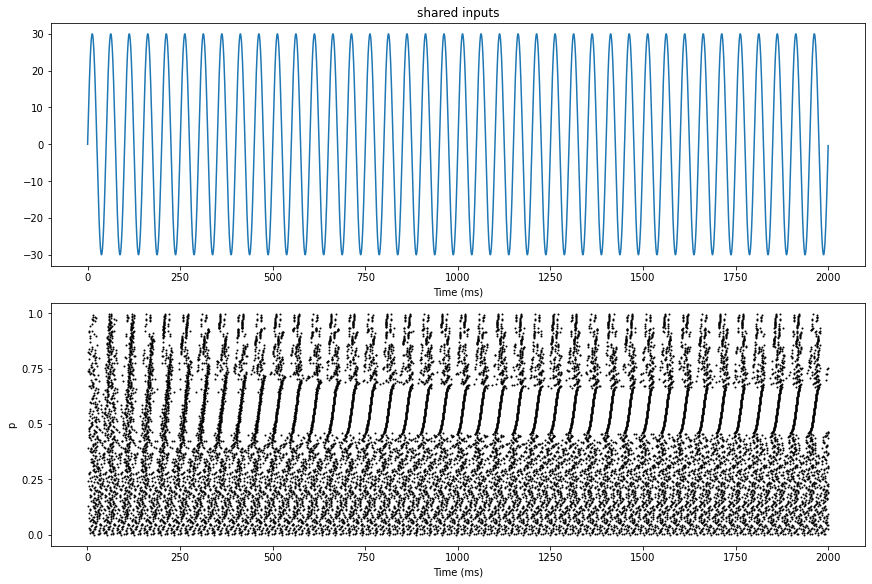
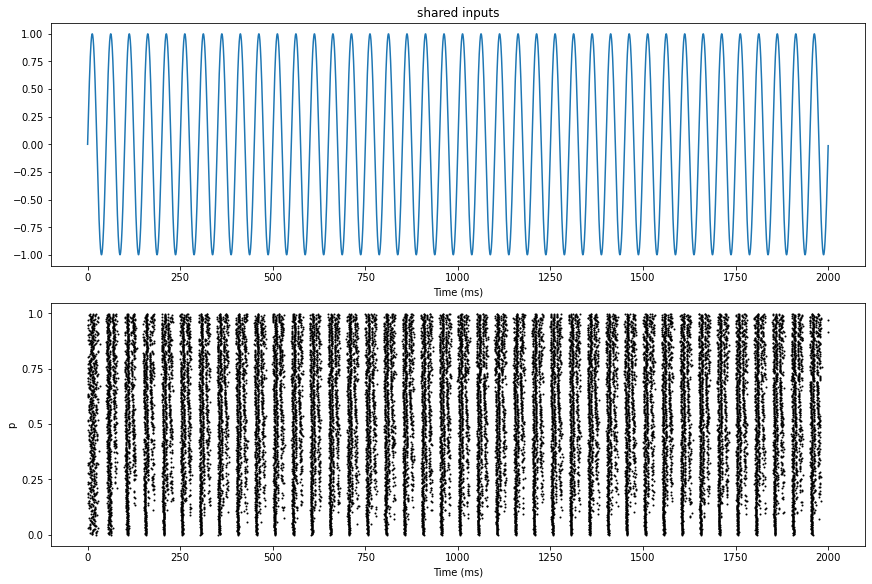
def figure7(sigma):
class Noise(ExternalInput):
def __init__(self, num):
super(Noise, self).__init__(num)
# parameters
self.p = bm.linspace(0., 1., num)
# variables
self.B = bm.Variable(bm.zeros(1))
def update(self, _t, _dt):
self.B[:] = 150 * bm.sin(40 * bm.pi * _t / 1000) # (1,)
self.I.value = 150 + self.p * self.B # (num,)
num = 500
model = NonlinearLeakyModel(num, inputs=Noise(num))
model.sigma = sigma
runner = bp.dyn.DSRunner(model, monitors=['inputs.B', 'spike'])
runner.run(1000.)
fig, gs = bp.visualize.get_figure(2, 1, 4, 8)
fig.add_subplot(gs[0, 0])
bp.visualize.line_plot(runner.mon.ts, runner.mon['inputs.B'], title='shared inputs')
fig.add_subplot(gs[1, 0])
bp.visualize.raster_plot(runner.mon.ts, runner.mon['spike'], ylabel='p')
plt.yticks(bm.linspace(0, num, 5).numpy(), bm.linspace(0., 1., 5).numpy())
plt.show()
[11]:
figure7(1.5)
[12]:
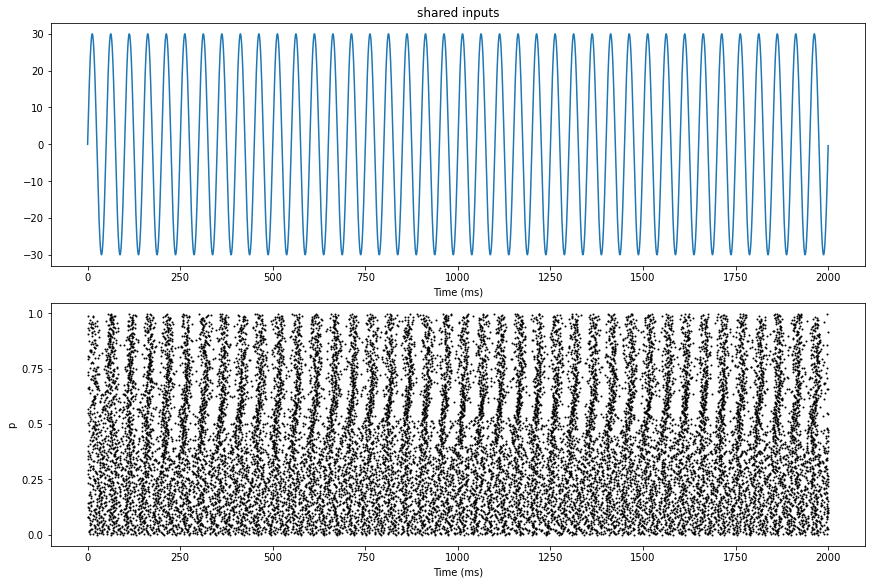
def figure8(sigma):
class Noise(ExternalInput):
def __init__(self, num):
super(Noise, self).__init__(num)
# parameters
self.p = bm.linspace(0., 1., num)
# variables
self.B = bm.Variable(bm.zeros(1))
def update(self, _t, _dt):
self.B[:] = 150 * bm.sin(40 * bm.pi * _t / 1000) # (1,)
self.I.value = 150 + self.p * self.B # (num,)
num = 500
model = NonlinearLeakyModel(num, inputs=Noise(num))
model.V.value = bm.random.uniform(model.Vr, model.Vt, model.num)
model.sigma = sigma
runner = bp.dyn.DSRunner(model, monitors=['inputs.B', 'spike'])
runner.run(1000.)
fig, gs = bp.visualize.get_figure(2, 1, 4, 8)
fig.add_subplot(gs[0, 0])
bp.visualize.line_plot(runner.mon.ts, runner.mon['inputs.B'], title='shared inputs')
fig.add_subplot(gs[1, 0])
bp.visualize.raster_plot(runner.mon.ts, runner.mon['spike'], ylabel='p')
plt.yticks(bm.linspace(0, num, 5).numpy(), bm.linspace(0., 1., 5).numpy())
plt.show()
[13]:
figure8(1.5)
[14]:
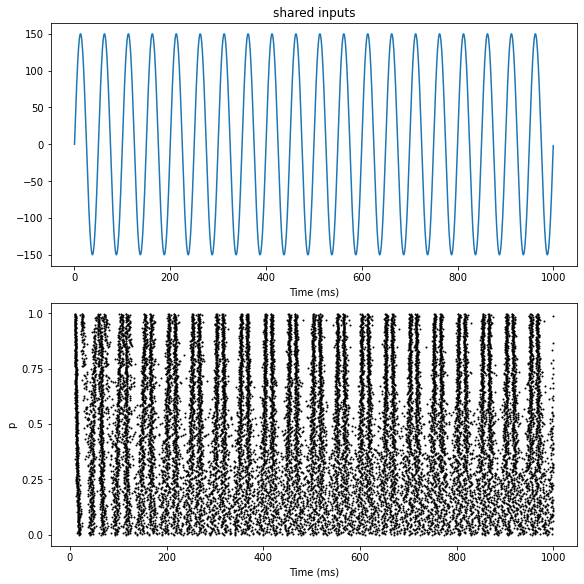
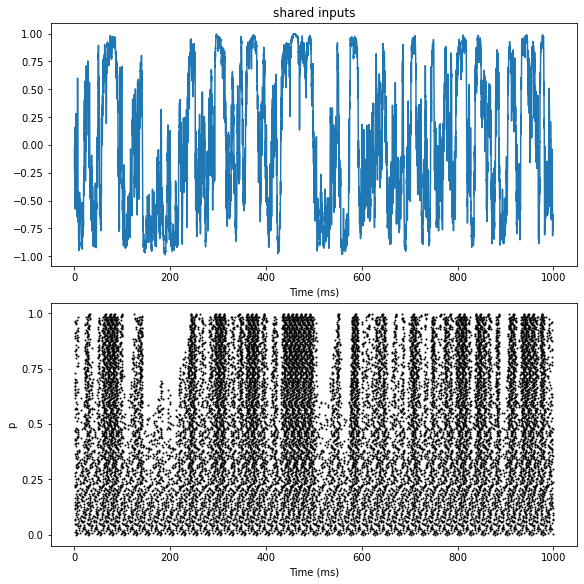
def figure9(sigma):
class Noise(ExternalInput):
def __init__(self, num):
super(Noise, self).__init__(num)
# parameters
self.p = bm.linspace(0., 1., num)
# variables
self.B = bm.Variable(bm.zeros(1))
def update(self, _t, _dt):
self.B[:] = bm.sin(40 * bm.pi * _t / 1000) # (1,)
self.I.value = 112.5 + (75 + 37.5 * self.p) * self.B + 37.5 * self.p # (num,)
num = 500
# B should be a triangular wave taking values between -1 and 1, with
# rising and falling time drawn uniformly between 10 ms and 50 ms.
# While we use sin wave instead.
model = LinearLeakyModel(num, inputs=Noise(num))
model.sigma = sigma
runner = bp.dyn.DSRunner(model, monitors=['inputs.B', 'spike'])
runner.run(2000.)
fig, gs = bp.visualize.get_figure(2, 1, 4, 12)
fig.add_subplot(gs[0, 0])
bp.visualize.line_plot(runner.mon.ts, runner.mon['inputs.B'], title='shared inputs')
fig.add_subplot(gs[1, 0])
bp.visualize.raster_plot(runner.mon.ts, runner.mon['spike'], ylabel='p')
plt.yticks(bm.linspace(0, num, 5).numpy(), bm.linspace(0., 1., 5).numpy())
plt.show()
[15]:
figure9(0.5)
[16]:
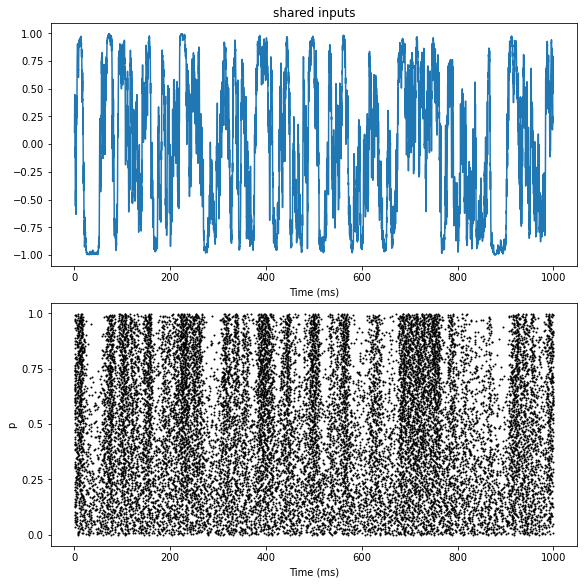
def figure10():
class Noise(ExternalInput):
def __init__(self, num):
super(Noise, self).__init__(num)
# parameters
self.tau = 10 # ms
self.p = bm.linspace(0., 1., num)
# variables
self.x = bm.Variable(bm.zeros(1))
self.B = bm.Variable(bm.zeros(1))
# functions
f = lambda x, t: -x / self.tau
g = lambda x, t: bm.sqrt(2. / self.tau)
self.integral = bp.sdeint(f=f, g=g)
def update(self, _t, _dt):
self.x.value = self.integral(self.x, _t, _dt) # (1,)
self.B.value = 2. / (1 + bm.exp(-2 * self.x)) - 1 # (1,)
self.I.value = 0.5 + 3 * self.p * self.B # (num,)
num = 500
model = NonLeakyModel(num, inputs=Noise(num))
runner = bp.dyn.DSRunner(model, monitors=['inputs.B', 'spike'])
runner.run(1000.)
fig, gs = bp.visualize.get_figure(2, 1, 4, 8)
fig.add_subplot(gs[0, 0])
bp.visualize.line_plot(runner.mon.ts, runner.mon['inputs.B'], title='shared inputs')
fig.add_subplot(gs[1, 0])
bp.visualize.raster_plot(runner.mon.ts, runner.mon['spike'], ylabel='p')
plt.yticks(bm.linspace(0, num, 5).numpy(), bm.linspace(0., 1., 5).numpy())
plt.show()
[17]:
def figure11(sigma):
class Noise(ExternalInput):
def __init__(self, num):
super(Noise, self).__init__(num)
# parameters
self.tau = 10 # ms
self.p = bm.linspace(0., 1., num)
# variables
self.x = bm.Variable(bm.zeros(1))
self.B = bm.Variable(bm.zeros(1))
# functions
f = lambda x, t: -x / self.tau
g = lambda x, t: bm.sqrt(2. / self.tau)
self.integral = bp.sdeint(f=f, g=g)
def update(self, _t, _dt):
self.x.value = self.integral(self.x, _t, _dt) # (1,)
self.B.value = 2. / (1 + bm.exp(-2 * self.x)) - 1 # (1,)
self.I.value = 0.5 + self.p * self.B # (num,)
num = 500
model = PerfectIntegrator(num, inputs=Noise(num))
model.sigma = sigma
runner = bp.dyn.DSRunner(model, monitors=['inputs.B', 'spike'])
runner.run(1000.)
fig, gs = bp.visualize.get_figure(2, 1, 4, 8)
fig.add_subplot(gs[0, 0])
bp.visualize.line_plot(runner.mon.ts, runner.mon['inputs.B'], title='shared inputs')
fig.add_subplot(gs[1, 0])
bp.visualize.raster_plot(runner.mon.ts, runner.mon['spike'], ylabel='p')
plt.yticks(bm.linspace(0, num, 5).numpy(), bm.linspace(0., 1., 5).numpy())
plt.show()
[18]:
figure11(0.)
[19]:
figure11(0.27)