(Jansen & Rit, 1995): Jansen-Rit Model
The Jansen-Rit model, a neural mass model of the dynamic interactions between 3 populations:
pyramidal cells (PCs)
excitatory interneurons (EINs)
inhibitory interneurons (IINs)
Originally, the model has been developed to describe the waxing-and-waning of EEG activity in the alpha frequency range (8-12 Hz) in the visual cortex [1]. In the past years, however, it has been used as a generic model to describe the macroscopic electrophysiological activity within a cortical column [2].
By using the linearity of the convolution operation, the dynamic interactions between PCs, EINs and IINs can be expressed via 6 coupled ordinary differential equations that are composed of the two operators defined above:
where \(V_{pce}\), \(V_{pci}\), \(V_{in}\) are used to represent the average membrane potential deflection caused by the excitatory synapses at the PC population, the inhibitory synapses at the PC population, and the excitatory synapses at both interneuron populations, respectively.
[1] B.H. Jansen & V.G. Rit (1995) Electroencephalogram and visual evoked potential generation in a mathematical model of coupled cortical columns. Biological Cybernetics, 73(4): 357-366.
[2] A. Spiegler, S.J. Kiebel, F.M. Atay, T.R. Knösche (2010) Bifurcation analysis of neural mass models: Impact of extrinsic inputs and dendritic time constants. NeuroImage, 52(3): 1041-1058, https://doi.org/10.1016/j.neuroimage.2009.12.081.
[1]:
import brainpy as bp
import brainpy.math as bm
[2]:
class JansenRitModel(bp.DynamicalSystem):
def __init__(self, num, C=135., method='exp_auto'):
super(JansenRitModel, self).__init__()
self.num = num
# parameters #
self.v_max = 5. # maximum firing rate
self.v0 = 6. # firing threshold
self.r = 0.56 # slope of the sigmoid
# other parameters
self.A = 3.25
self.B = 22.
self.a = 100.
self.tau_e = 0.01 # second
self.tau_i = 0.02 # second
self.b = 50.
self.e0 = 2.5
# The connectivity constants
self.C1 = C
self.C2 = 0.8 * C
self.C3 = 0.25 * C
self.C4 = 0.25 * C
# variables #
# y0, y1 and y2 representing the firing rate of
# pyramidal, excitatory and inhibitory neurones.
self.y0 = bm.Variable(bm.zeros(self.num))
self.y1 = bm.Variable(bm.zeros(self.num))
self.y2 = bm.Variable(bm.zeros(self.num))
self.y3 = bm.Variable(bm.zeros(self.num))
self.y4 = bm.Variable(bm.zeros(self.num))
self.y5 = bm.Variable(bm.zeros(self.num))
self.p = bm.Variable(bm.ones(self.num) * 220.)
# integral function
self.derivative = bp.JointEq([self.dy0, self.dy1, self.dy2, self.dy3, self.dy4, self.dy5])
self.integral = bp.odeint(self.derivative, method=method)
def sigmoid(self, x):
return self.v_max / (1. + bm.exp(self.r * (self.v0 - x)))
def dy0(self, y0, t, y3): return y3
def dy1(self, y1, t, y4): return y4
def dy2(self, y2, t, y5): return y5
def dy3(self, y3, t, y0, y1, y2):
return (self.A * self.sigmoid(y1 - y2) - 2 * y3 - y0 / self.tau_e) / self.tau_e
def dy4(self, y4, t, y0, y1, p):
return (self.A * (p + self.C2 * self.sigmoid(self.C1 * y0)) - 2 * y4 - y1 / self.tau_e) / self.tau_e
def dy5(self, y5, t, y0, y2):
return (self.B * self.C4 * self.sigmoid(self.C3 * y0) - 2 * y5 - y2 / self.tau_i) / self.tau_i
def update(self, tdi):
self.y0.value, self.y1.value, self.y2.value, self.y3.value, self.y4.value, self.y5.value = \
self.integral(self.y0, self.y1, self.y2, self.y3, self.y4, self.y5, tdi.t, p=self.p, dt=tdi.dt)
[3]:
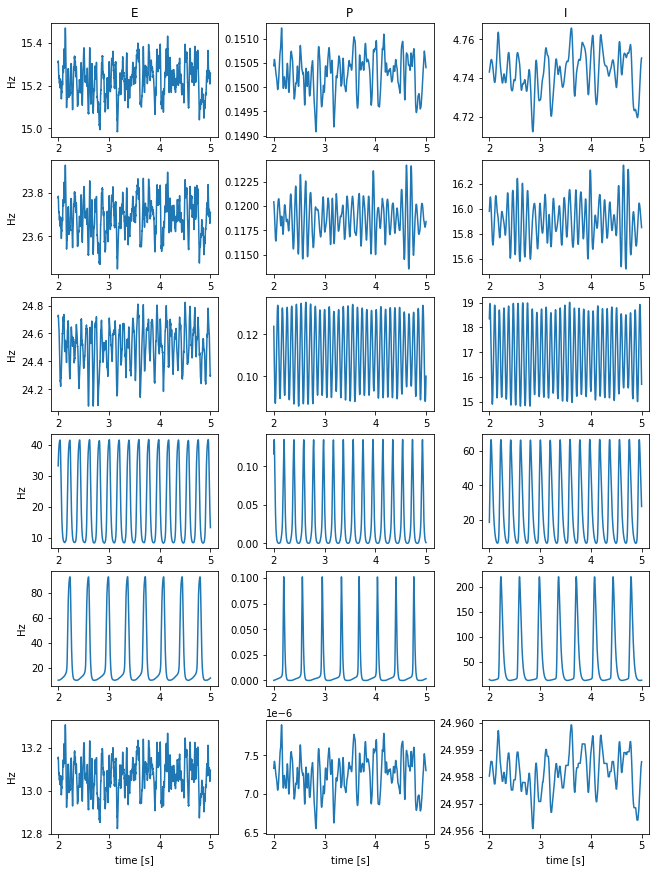
def simulation(duration=5.):
dt = 0.1 / 1e3
# random input uniformly distributed between 120 and 320 pulses per second
all_ps = bm.random.uniform(120, 320, size=(int(duration / dt), 1))
jrm = JansenRitModel(num=6, C=bm.array([68., 128., 135., 270., 675., 1350.]))
runner = bp.DSRunner(jrm,
monitors=['y0', 'y1', 'y2', 'y3', 'y4', 'y5'],
inputs=['p', all_ps, 'iter', '='],
dt=dt)
runner.run(duration)
start, end = int(2 / dt), int(duration / dt)
fig, gs = bp.visualize.get_figure(6, 3, 2, 3)
for i in range(6):
fig.add_subplot(gs[i, 0])
title = 'E' if i == 0 else None
xlabel = 'time [s]' if i == 5 else None
bp.visualize.line_plot(runner.mon.ts[start: end], runner.mon.y1[start: end, i],
title=title, xlabel=xlabel, ylabel='Hz')
fig.add_subplot(gs[i, 1])
title = 'P' if i == 0 else None
bp.visualize.line_plot(runner.mon.ts[start: end], runner.mon.y0[start: end, i],
title=title, xlabel=xlabel)
fig.add_subplot(gs[i, 2])
title = 'I' if i == 0 else None
bp.visualize.line_plot(runner.mon.ts[start: end], runner.mon.y2[start: end, i],
title=title, show=i==5, xlabel=xlabel)
[4]:
simulation()
WARNING:jax._src.lib.xla_bridge:No GPU/TPU found, falling back to CPU. (Set TF_CPP_MIN_LOG_LEVEL=0 and rerun for more info.)